m.s. thesis: evolving character controllers
Full title: Evolving Character Controllers for Collision Preparation
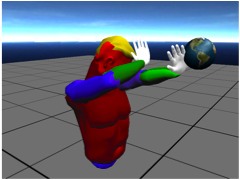
Abstract: Full dynamic control of physically simulated characters is the holy grail of video games and other interactive applications. Recent advances in the field have presented controllers that can handle the balance and fall response after a collision. This thesis addresses the development of a controller that handles the response before a collision--reflexive posturing that protects the character from impact. To solve this problem we present a technique that uses genetic algorithms to optimize a pose controller based on analysis from a pain measurement system. Applying our technique we develop collision preparatory controllers that defend a virtual character in several different styles from a variety of threats.
Link